aan wrote:hehehe iya om, seinget saya dulu pake gyro PG-03, v-tail punya GWS, motor axi yang kecil, blade dari balsa dilekukin, trus dikerasin pake CA. karena motor punya delay cukup lama saat harus mengkompensasi kemiringan karena kompensasinya vertikal (beda dengan tail heli yang kompensasinya lateral), sedangkan gyro terlalu cepat merespon gerakan akhirnya sering over shoot, (seperti kita ketahui rate gyro merespon gerakan hanya sesaat setelah itu kembali ke nol, jika posisi pesawat belum level karena delay motor dan gyro sudah kembali ke nol, maka leveling tidak akan tercapai) akhirnya respon gyro jadi tidak bener, tapi belajar dari heli draganflyer (yang 4 rotor itu) dia menambahkan accelerometer untuk mengunci respon gyro--> efeknya kira2 akan seperti Gyro HH pada tail heli. menurut hemat saya tanpa accelerometer harusnya bisa asalkan gyro, vtail, dan esc punya resolusi yang cukup tinggi tentunya jempol harus bergoyang dombret lebih banyak hehehehe
iwan21 wrote:
aan wrote:usul om... gimana kalo gini, temenku dulu ada yang nyoba bagus tuh
konfigurasi ini udah saya coba om, tapi enggak tau susah juga ya...kadang ada motor yg muter duluan...eh pas satunya muter, si gyro komopensasi malah kayak ayam di potong he heheh
Dear Pak Aan,
Seperti kata Pak Iwan21, emang udah dicoba tapi enggak berjalan dengan lancar, mungkin benar configurasi dari gyro dan mixer. Padahal dua peralatan tersebut dengan product yang sama GWS.
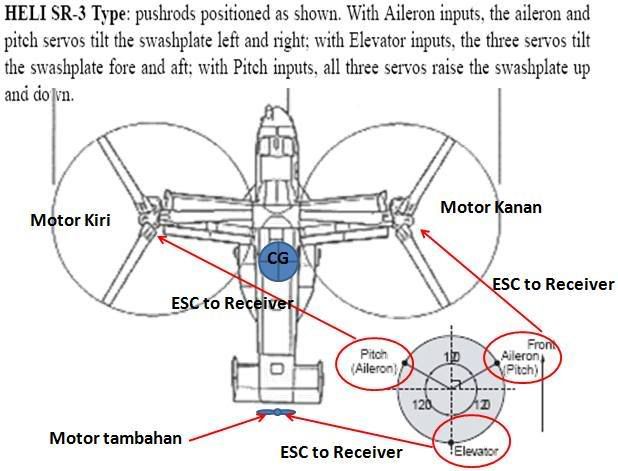
Rencana berikut saya akan menambahkan satu motor dibelakang dengan posisi vertical dengan koneksi ketiga motor tersebut seolah-olah sebagai swash plate dari heli dengan set-up CCPM. Demikian Om Aan mohon masukannya.
gileee bener .... kayaknya udah main kelas tinggi semua nih ...
karya pak roji mantep bener ... termasuk F16 dirumah ...
cuman coret2 aja difoam .... laungsung jadi n langsung mabur deh ....
sip ... deh .. lanjut terus pak roji .... saya minta copy an nya aja deh ... hehe ...
iya om memang sulit, dalam dunia nyata (bukan RC hehe) juga masih dikembangkan tekniknya. menurut pendapat saya, kalo kita pake 2 blade dengan arah putar berlawanan,mereka sudah saling menghilangkan efek kontra rotasi, kalo kita pasang lagi satu, nah yang satu ini akan berlawanan dengan siapa?, pesawat pasti akan berputar ke satu arah. berarti kalo mau nambah harus 4, ini menurut logika saya lho om soalnya belum pernah nyobain yang 3 rotor hehehe
aan wrote:iya om memang sulit, dalam dunia nyata (bukan RC hehe) juga masih dikembangkan tekniknya. menurut pendapat saya, kalo kita pake 2 blade dengan arah putar berlawanan,mereka sudah saling menghilangkan efek kontra rotasi, kalo kita pasang lagi satu, nah yang satu ini akan berlawanan dengan siapa?, pesawat pasti akan berputar ke satu arah. berarti kalo mau nambah harus 4, ini menurut logika saya lho om soalnya belum pernah nyobain yang 3 rotor hehehe
Dear Om,
V22 Osprey termasuk sukses? meskipun belum saya cobain, tapi saya dapat inspirasi dari bentuk V-TOL yang hanya menggunakan 3 buah motor blade di joint dengan stick dalam bentuk configurasi "Y".
Syafik wrote:Motor kiri dan kanan berputar berlawanan ya pak...??
Kalau ditambah motor posisi belakang kecil, apakah RPMnya lbh tinggi untuk mengimbangi 2 motor kiri dan kanan...
Untuk 2 motor utama menggunakan counter rotating, untuk motor yang dibelakang pada prinsipnya sama dengan fungsi motor kiri dan kanan
Maka dari itu bener kata Om syafik perlu putaran yang tinggi(secara logika).
Karena saya menggunakan motor 350 dan blade kecil. Untuk itu saya akan setel CG dengan menggeser-geser bateray (digambar saya sebelumnya).
Sebagai contoh kalau motor tambahan menjauh kebelakang dengan CG yang sama , maka dengan RPM dan picth propeller yang sama akan bisa mengimbangin 2 motor utama.
Haloo,
kalo boleh usul saya ada ide sederhana.. contoh teknologinya heli XRB, sptnya ada tuh kelas heli XRB walkera yang agak gedean ( diatas S5 ) bisa di atur rotor atas di kanan dan rotor bawah ada di kiri ( Fix Pit ) sementara boardnya udah including gyro..apalagi kalo di bantu wing kemungkinan dgn kelas V4 aja saya kira udah bisa ...terbang...
Yagee wrote:Haloo, kalo boleh usul saya ada ide sederhana.. contoh teknologinya heli XRB, sptnya ada tuh kelas heli XRB walkera yang agak gedean ( diatas S5 ) bisa di atur rotor atas di kanan dan rotor bawah ada di kiri ( Fix Pit ) sementara boardnya udah including gyro..apalagi kalo di bantu wing kemungkinan dgn kelas V4 aja saya kira udah bisa ...terbang...
Tq Om Yagee sarannya, bisa-bisa menjadi solusi yang top. karena dari hasil configurasi dengan menggunakan CCPM, udah set-up nya mabok demikian control terbangnya (juga mabok). Tetapi kami ingin menterjemahkan dari V22 aslinya ke tipe RC nya.
Mohon terus masukannya.