sbgmn diketahui PWM outputnya receiver berbeda dgn PWM yg ada didalam ESC. Jd ini mau ngarsip bagaimana sinyal PWM outputnya receiver pada masing" channel. Smoga nanti ketemu bacaan yg enak untuk PWM didalam ESC untuk membuat output untuk menggerakkan DC brushless motor.
Biar informasi ini juga bisa dinikmati oleh pemula dan dikoreksi oleh para suhu berikut keterangannya:
- Fungsi sinyal ini adalah bisa dipakai untuk merepresentasikan bilangan pecahan. Chonto saja prosentase yg bergerak dari 0-100%.
- bilangan pecahan tsb bisa diterjemah lagi ke bentuk" gerakan servo atau jika ke ESC menjadi torsi motor. Torsi ini yg kemudian di konversi oleh propeller menjadi thrust.
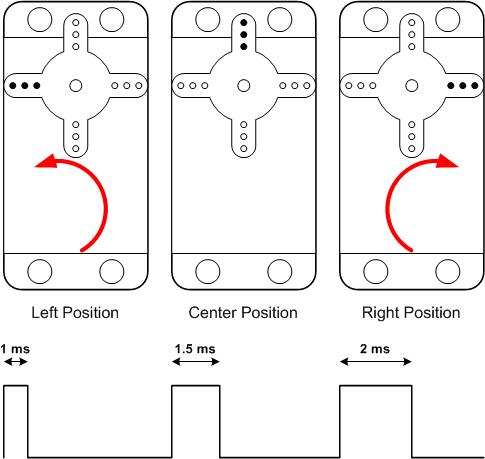
- Pulse Width Modulation menganut ketetapan bahwa frequensi signal yg keluar adalah tetap lbh jelas lagi: periode signalnya tetap. Yang dimodulasi adalah lebar pulsanya. Output untuk servo katanya statistik enak menggunakan perioda 20ms. tidak harus 20ms tapinya..
berikut penampakan bentuk signal dibanding rotasi yg diharapkan ketika diaplikasikan kepada servo.

Mengacu pada RC plane ada rudder (belok kiri-kanan), elevator (naik-turun), aeleron (miring kiri-kanan) dan trottel (kecepatan maju). Di quadcopter kemungkinan beda misalnya trottel umumnya digunakan untuk naik/turun dst.
Masing masing tersebut akan diwakili oleh signal PWM masing-masing. Salah satu teknik membawa signal PWM tersebut kesebuah sinyal pada transmitter adalah dengan signal PPM [Pulse position], jadi PPM adalah kumpulan signal PWM yg dijadikan satu untuk dikirimkan ke receiver, untuk dibongkar kembali menjadi signal PWM masing-masing chanel dari output receiver.
Flight controller pada multicopter mendapat input dari receiver, mengkalkulasi semua input tersebut untuk kemudian diterjemah menjadi bbrp output PWM. Yakni: pada quadcopter menjadi 4 signal PWM menuju 4 ESC, menjadi 6 bila hexacopter, 8 bila octocopter dst. [ini bener ngak yah.. blm punya barangnya euy...
Selanjutnya masing" signal PWM yang diterima oleh ESC akan di ubah menjadi signal output untuk DC motor brushless.. Sinyal output tsb dibentuk oleh sinyal PWM yg dibuat dan dimanage sendiri didalam ESC. lah PWM yg untuk menggerakkan DC motor brushless ini yg seru.. soalnya ane juga belom mudeng-mudeng..