Quadcopter Build Thread by Aan
Posted: 25 Jun 2011, 20:28
biar nggak mbingungi sekalian biar racunnya makin mematikan, monggo yang sudah pernah merakit share
disini. saya awali deh kbetulan yang pernah dibikin multiwii, murah dan kemampuannya lumayan, fitur yang sekarang ada masih sampe autolevel, altitude hold, heading hold (pake magnetometer), sementara gps hold belum dikembangin . disini saya cuman sampe auto level saja. barangkali saya kurang jelas silahkan di kroscek dengan
link aslinya: http://www.multiwii.com, http://www.multiwiicopter.com/pages/multiwiicopter-wiki,
http://www.rcgroups.com/forums/showthread.php?t=1332876, http://radio-commande.com/international ... er-design/
saya bagi jadi 3 bagian saja biar enak, bagian 1 yaitu controller, bagian 2 yaitu motor esc frame dll, bagian 3 accesories (lcd buat configurasi di lapangan)
bagian 1:
bahan2:
1. arduino promini 328,5v,16 Mega (kloningannya juga boleh)= $18
http://www.sparkfun.com/products/9218, atau
http://cgi.ebay.com/ARDUINO-Pro-Mini-AT ... 1c19591cbb
2. Wii motion Plus (ini isinya Gyro 3axis)= $4
http://cgi.ebay.com/New-Motion-Plus-f-N ... 20b74c9409
3. wii nunchuck (isinya accelerometer 3 axis) = $4
http://cgi.ebay.com/NEW-Black-Nunchuck- ... 20b7a09cfa

buka cassingnya, ambil board2nya saja:
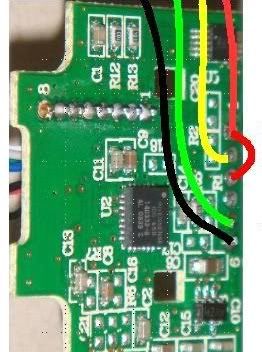
WMP:
nunchuck:
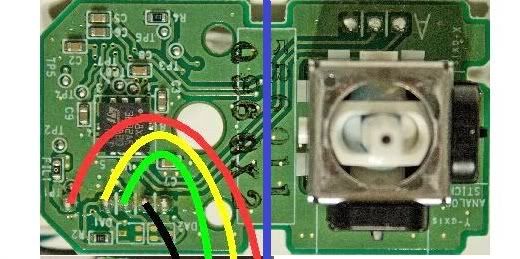
perhatikan garis vertikal biru, potong saja boardnya disitu karena kita ga butuh stiknya
lalu koneksikan seperti ini:
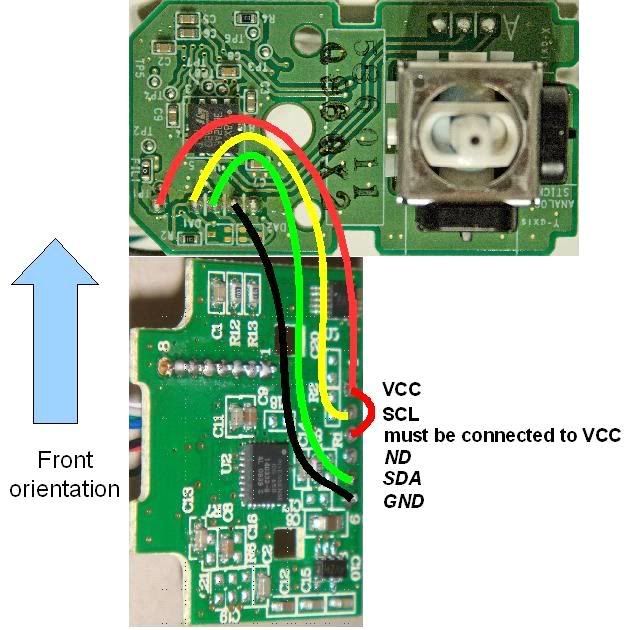
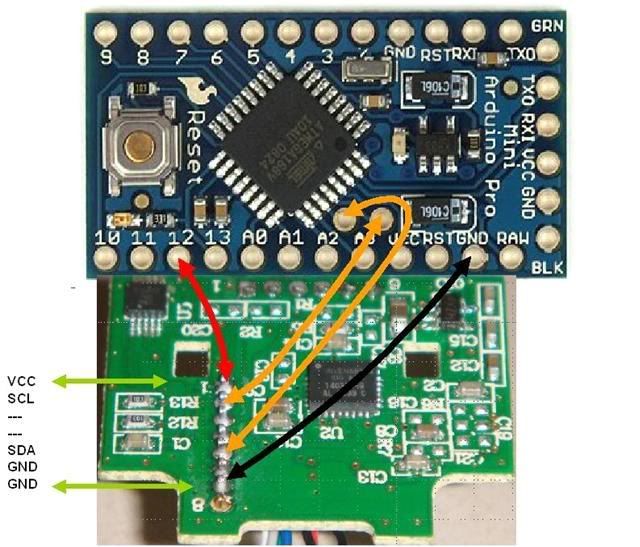
lalu koneksikan arduinonya seperti ini (nunchuck tandem dengan wii motion plus) jadi nunchuck kita koneksikan dengan WMP, port WMP kita koneksikan dgn arduino)
atur2 posisi supaya enak dan ga goyang, kalo saya di tumpuk dan dimasukkin ke casing bekas rx,
board sensor2 sebisa mungkin rata air, antar board diberi lem tembak (basa kromonya hot melt glue).
selanjutnya
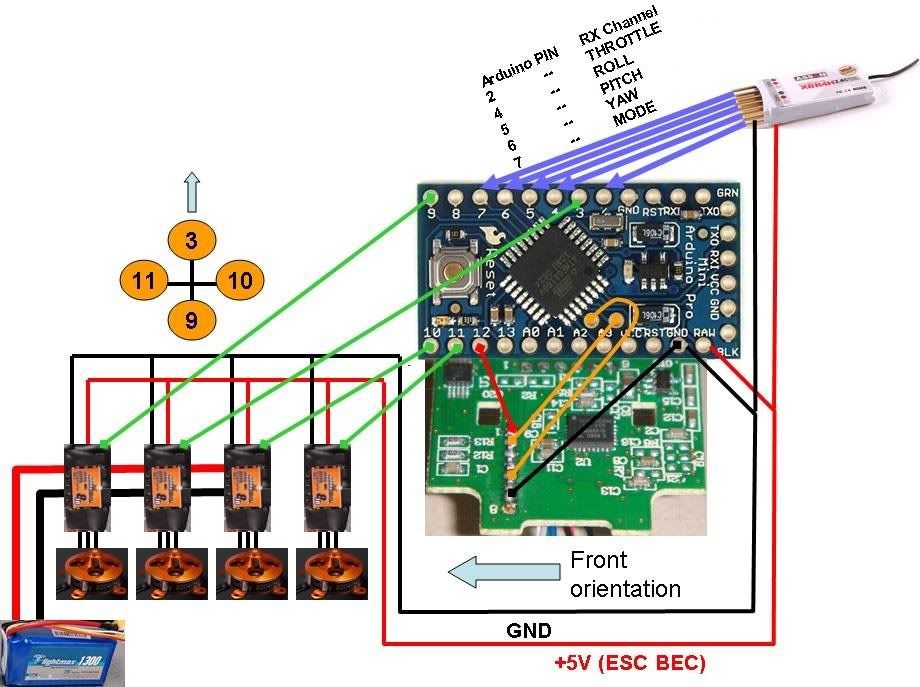
layout untuk quad +:
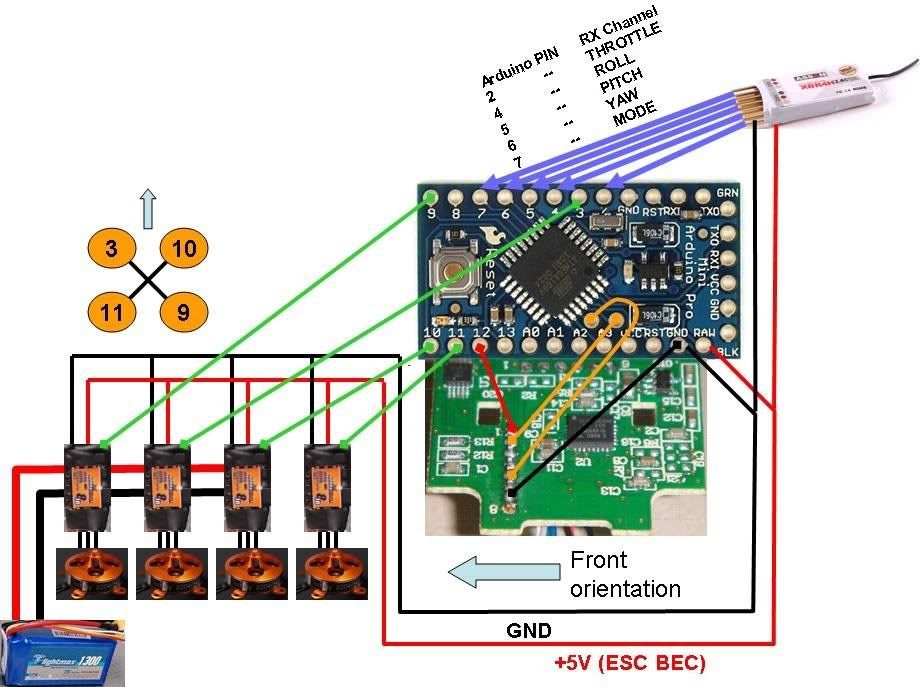
layout untuk quad X:
contoh :

berikutnya software:
downlaod arduino downloader (berguna untuk menginjekkan firmware ke board arduino) : http://arduino.cc/en/Main/Software
download multiwii versi terakhir (1.7) isinya ada firmware buat arduino dan aplikasi untuk konfigurasi :
http://code.google.com/p/multiwii/sourc ... iiV1_7.zip (klik 'view raw file)
selanjunya kita butuh alat untuk mengisi board arduino
dgn firmware. arduino menggunakan komunikasi serial dgn baudrate 15200 level ttl
kalo mau praktis beli ftdi board : http://www.sparkfun.com/products/9716
ada solusi lebih murmer:
arduino menggunakan komunikasi serial untuk mengisi software nya tapi level ttl (5volt).
menggunakan usb to serial bisa digunakan tapi kita masih butuh max 232 untuk mongkonversi cmos to ttl. solusi paling murah adalah pake kabel data hp nokia (dia pake ic profilic (usb to serial dan
keluarannya ttl)).link: http://jethomson.wordpress.com/2010/02/ ... -for-3usd/
saya sendiri pake kabel nokia jadul buat download2 arduino
buka arduino downloader, cari file multiwiiv1_7.pde
set firmware sbb:
mendisable pilihan dengan memberi tanda //, dan mengenable dgn membuang tanda //
1. cari dan set '#define MINTHROTTLE '
ini adalah posisi dimana motor muter idle (kalo hk ss bisa diisi 1180 - 1200). ini berfungsi
membatasi agar kompensasi gyro ga sampe membuat motor mati. efeknya nanti QC kayak kuda lumping
terbangnya.
2. cari #define TRI
disable dgn menambah tanda // didepannya. lalu enable type yang diinginkan, misal quadX:
//#define QUADX jadi #define QUADX
3. cari #define I2C_SPEED 100000L
pilih aja yang 100000L karena yang 400000L kurang konsisten
4. cari #define PROMINI
pilih promini kalo pake board atmega, pilih yang mega
5. cari #define INTERNAL_I2C_PULLUPS
ini harus di enable karena board arduino kita bekerja di 5v sedang board2 wii di 3,3volt
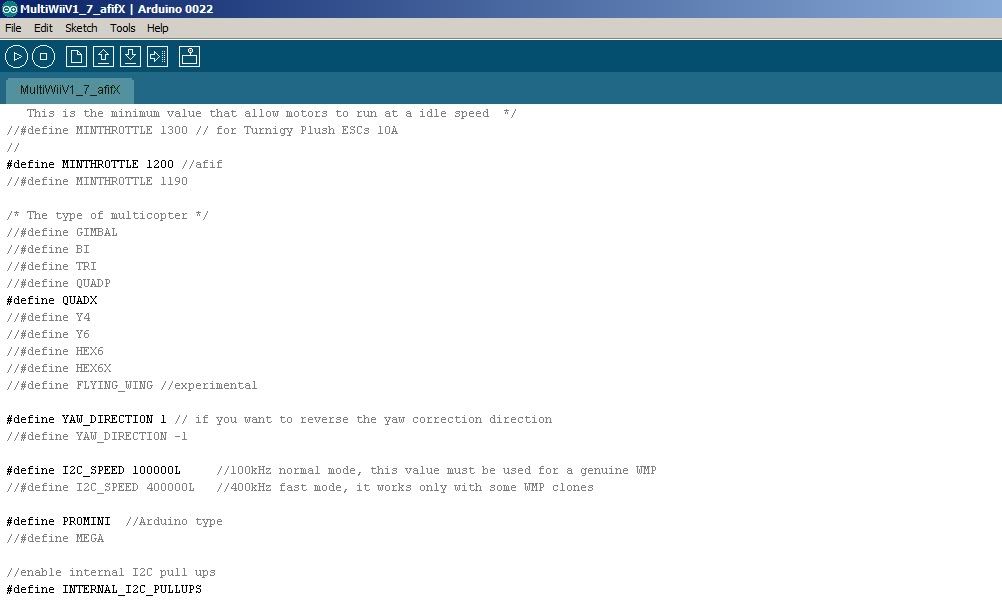
selasai, save lalu download.....
selesai download, cari aplikasi MultiWiiConf1_7 dan jalankan, jika ga mau berarti kita butuh java
runtime environment, download disini http://www.oracle.com/technetwork/java/ ... 46243.html, pilih saja yang Windows x86 Offline.
tampilan:
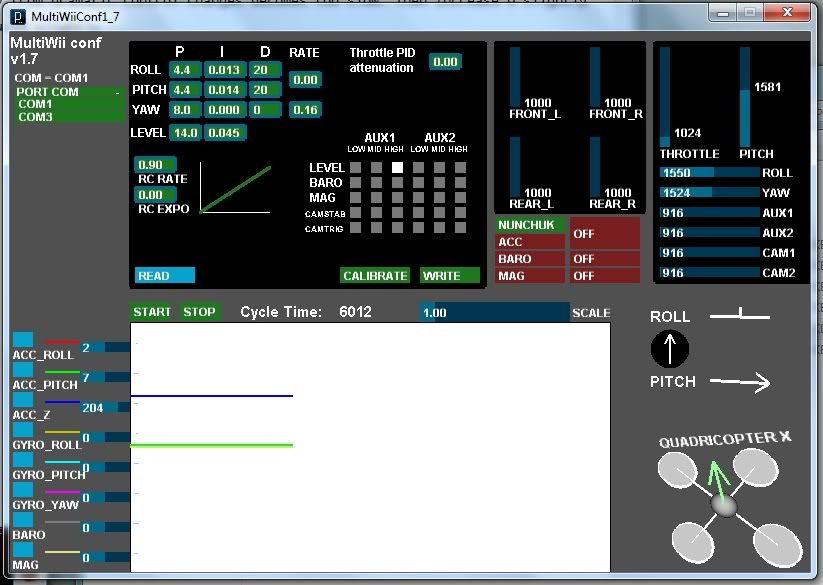
pilih com port yang kita gunakan, klik start lalu klik read. letakkan controller kita rata air,
lalu klik calibrate, write. selesai.
sementara kita coba pake dulu seting defaultnya.
P : adalah gain gyro, kalo kekecilan QC goyang2, kalo kegedean gemetaran
I : holding faktor (kalo di gyro sih heading hold faktor), makin gede makin 'mbandul', makin kecil makin lincah
D : kecepatan reaksi gyro, makin gede makin gemetaran, makin kecil makin goyang2
di menuo level:
P : gain kalo kekecilan QC terbangnya kayak ayunan, kalo kita kasih stik kanan trus di lepas QC
goyang2 jauh, kalo kegedean ngunci banget tapi kalo kena angin bisa goyang yang makin lama makin
gede goyangannya.
sekarang controller siap di tes, konekkan radio rx ke kontroller, dan kontroller tetap ke komputer.
(wah bingung nih ngejelasinnya kayaknya mesti pake video ya )
)
multiwii begitu dinyalakan tidak serta merta esc motor on, untuk meng on kan kita mesti meng arming motor:
http://cdn.shopify.com/s/files/1/0061/4 ... er.gif?286
link: http://www.multiwiicopter.com/pages/multiwiicopter-wiki
selesai dah... kontroller kita
bagian 2:
design dasar:
1.motor: pilih motor dg kv rendah untuk efisiensi. motor tidak boleh dipaksa bekerja di full powernya karena kerjanya jadi ga konsisten dan controller ga punya space power lagi untuk melakukan stabilisasi. misal motor dgn trust 400gr (X4=1600gr) maka maksimal QC kita bobotnya (3/4X1600= 1200 gr).
2.propeller: untuk lama2an terbang pilih yang slow flyer (tapi jadi mudah goyang kena angin), untuk kencng2an pake yang biasa. pilih yang pitchnya rendah misal 8X4 akan lebih baik dari 8X6
3.frame: kayaknya banyak suhu2 yang lebih jago nih
4.esc: untuk saat ini yang saya tahu yang rekomended buat multiwii itu HK SS dan turnigy plush, karena ratenya tinggi
setting esc:
brake off
timing low (pake midle/ high bikin motor panas, pake low pun cukup bagus)
cut off dimatikan saja/reduce/low
start normal/ airplane mode
batre pilih nicd/nimh (kalo milih lipo kadang2 salah satu motor colaps sebentar pas terbang)
Bagian 3:
lcd buat konfigurasi dilapangan
kalo dilapangan ga bisa bawa2 laptop, bisa pake lcd. gampangnya sih beli http://www.sparkfun.com/products/9394.
mau bikin sendiri juga bisa.
lcd ini hanya menerima data ascii kemudian menampilkannya di lcd. contoh code pake bascom, monggo disesuaikan sendiri:
'--- Multi Wii copter ---
'--- LCD Config ---
'--- Chip ---
$regfile = "m32def.dat"
$crystal = 4000000
$baud = 115200
$hwstack = 32
$swstack = 10
$framesize = 40
'--- lcd ---
Config Lcdpin = Pin , Db4 = Porta.4 , Db5 = Porta.5 , Db6 = Porta.6 , Db7 = Porta.7 , E = Porta.3 , Rs = Porta.2
Config Lcd = 16 * 2
'--- Dims ---
Dim Wii_string As String * 36
Dim Wii_string_pars As String * 36
Dim Wii_name As String * 16
Dim Wii_wert As String * 16
Dim S As String * 1
Dim X As Integer
'--- boot ---
Cls
Cursor Off
Wait 1
Locate 1 , 1
Lcd "MultiWii Conf"
Locate 2 , 1
Lcd "by Afif"
' Wait 2
'Cls
'--- Main ---
Do
Wii_string = ""
Wii_name = ""
Wii_wert = "" ''
Inputbin Wii_string
Cls
X = 0
Do
S = Mid(wii_string , X , 1)
X = X + 1
Loop Until S = "L"
Wii_string_pars = Mid(wii_string , X , 36)
Wii_name = Mid(wii_string_pars , 2 , 16)
Wii_wert = Mid(wii_string_pars , 25 , 5)
Locate 1 , 1
Lcd Wii_name
Locate 2 , 1
Lcd Wii_wert
Loop
End
to be continue.....huahhh capek....
disini. saya awali deh kbetulan yang pernah dibikin multiwii, murah dan kemampuannya lumayan, fitur yang sekarang ada masih sampe autolevel, altitude hold, heading hold (pake magnetometer), sementara gps hold belum dikembangin . disini saya cuman sampe auto level saja. barangkali saya kurang jelas silahkan di kroscek dengan
link aslinya: http://www.multiwii.com, http://www.multiwiicopter.com/pages/multiwiicopter-wiki,
http://www.rcgroups.com/forums/showthread.php?t=1332876, http://radio-commande.com/international ... er-design/
saya bagi jadi 3 bagian saja biar enak, bagian 1 yaitu controller, bagian 2 yaitu motor esc frame dll, bagian 3 accesories (lcd buat configurasi di lapangan)
bagian 1:
bahan2:
1. arduino promini 328,5v,16 Mega (kloningannya juga boleh)= $18
http://www.sparkfun.com/products/9218, atau
http://cgi.ebay.com/ARDUINO-Pro-Mini-AT ... 1c19591cbb
2. Wii motion Plus (ini isinya Gyro 3axis)= $4
http://cgi.ebay.com/New-Motion-Plus-f-N ... 20b74c9409
3. wii nunchuck (isinya accelerometer 3 axis) = $4
http://cgi.ebay.com/NEW-Black-Nunchuck- ... 20b7a09cfa
buka cassingnya, ambil board2nya saja:
WMP:
nunchuck:
perhatikan garis vertikal biru, potong saja boardnya disitu karena kita ga butuh stiknya
lalu koneksikan seperti ini:
lalu koneksikan arduinonya seperti ini (nunchuck tandem dengan wii motion plus) jadi nunchuck kita koneksikan dengan WMP, port WMP kita koneksikan dgn arduino)
atur2 posisi supaya enak dan ga goyang, kalo saya di tumpuk dan dimasukkin ke casing bekas rx,
board sensor2 sebisa mungkin rata air, antar board diberi lem tembak (basa kromonya hot melt glue).
selanjutnya
layout untuk quad +:
layout untuk quad X:
contoh :
berikutnya software:
downlaod arduino downloader (berguna untuk menginjekkan firmware ke board arduino) : http://arduino.cc/en/Main/Software
download multiwii versi terakhir (1.7) isinya ada firmware buat arduino dan aplikasi untuk konfigurasi :
http://code.google.com/p/multiwii/sourc ... iiV1_7.zip (klik 'view raw file)
selanjunya kita butuh alat untuk mengisi board arduino
dgn firmware. arduino menggunakan komunikasi serial dgn baudrate 15200 level ttl
kalo mau praktis beli ftdi board : http://www.sparkfun.com/products/9716
ada solusi lebih murmer:
arduino menggunakan komunikasi serial untuk mengisi software nya tapi level ttl (5volt).
menggunakan usb to serial bisa digunakan tapi kita masih butuh max 232 untuk mongkonversi cmos to ttl. solusi paling murah adalah pake kabel data hp nokia (dia pake ic profilic (usb to serial dan
keluarannya ttl)).link: http://jethomson.wordpress.com/2010/02/ ... -for-3usd/
saya sendiri pake kabel nokia jadul buat download2 arduino
buka arduino downloader, cari file multiwiiv1_7.pde
set firmware sbb:
mendisable pilihan dengan memberi tanda //, dan mengenable dgn membuang tanda //
1. cari dan set '#define MINTHROTTLE '
ini adalah posisi dimana motor muter idle (kalo hk ss bisa diisi 1180 - 1200). ini berfungsi
membatasi agar kompensasi gyro ga sampe membuat motor mati. efeknya nanti QC kayak kuda lumping
terbangnya.
2. cari #define TRI
disable dgn menambah tanda // didepannya. lalu enable type yang diinginkan, misal quadX:
//#define QUADX jadi #define QUADX
3. cari #define I2C_SPEED 100000L
pilih aja yang 100000L karena yang 400000L kurang konsisten
4. cari #define PROMINI
pilih promini kalo pake board atmega, pilih yang mega
5. cari #define INTERNAL_I2C_PULLUPS
ini harus di enable karena board arduino kita bekerja di 5v sedang board2 wii di 3,3volt
selasai, save lalu download.....
selesai download, cari aplikasi MultiWiiConf1_7 dan jalankan, jika ga mau berarti kita butuh java
runtime environment, download disini http://www.oracle.com/technetwork/java/ ... 46243.html, pilih saja yang Windows x86 Offline.
tampilan:
pilih com port yang kita gunakan, klik start lalu klik read. letakkan controller kita rata air,
lalu klik calibrate, write. selesai.
sementara kita coba pake dulu seting defaultnya.
P : adalah gain gyro, kalo kekecilan QC goyang2, kalo kegedean gemetaran
I : holding faktor (kalo di gyro sih heading hold faktor), makin gede makin 'mbandul', makin kecil makin lincah
D : kecepatan reaksi gyro, makin gede makin gemetaran, makin kecil makin goyang2
di menuo level:
P : gain kalo kekecilan QC terbangnya kayak ayunan, kalo kita kasih stik kanan trus di lepas QC
goyang2 jauh, kalo kegedean ngunci banget tapi kalo kena angin bisa goyang yang makin lama makin
gede goyangannya.
sekarang controller siap di tes, konekkan radio rx ke kontroller, dan kontroller tetap ke komputer.
(wah bingung nih ngejelasinnya kayaknya mesti pake video ya
)multiwii begitu dinyalakan tidak serta merta esc motor on, untuk meng on kan kita mesti meng arming motor:
http://cdn.shopify.com/s/files/1/0061/4 ... er.gif?286
link: http://www.multiwiicopter.com/pages/multiwiicopter-wiki
selesai dah... kontroller kita
bagian 2:
design dasar:
1.motor: pilih motor dg kv rendah untuk efisiensi. motor tidak boleh dipaksa bekerja di full powernya karena kerjanya jadi ga konsisten dan controller ga punya space power lagi untuk melakukan stabilisasi. misal motor dgn trust 400gr (X4=1600gr) maka maksimal QC kita bobotnya (3/4X1600= 1200 gr).
2.propeller: untuk lama2an terbang pilih yang slow flyer (tapi jadi mudah goyang kena angin), untuk kencng2an pake yang biasa. pilih yang pitchnya rendah misal 8X4 akan lebih baik dari 8X6
3.frame: kayaknya banyak suhu2 yang lebih jago nih
4.esc: untuk saat ini yang saya tahu yang rekomended buat multiwii itu HK SS dan turnigy plush, karena ratenya tinggi
setting esc:
brake off
timing low (pake midle/ high bikin motor panas, pake low pun cukup bagus)
cut off dimatikan saja/reduce/low
start normal/ airplane mode
batre pilih nicd/nimh (kalo milih lipo kadang2 salah satu motor colaps sebentar pas terbang)
Bagian 3:
lcd buat konfigurasi dilapangan
kalo dilapangan ga bisa bawa2 laptop, bisa pake lcd. gampangnya sih beli http://www.sparkfun.com/products/9394.
mau bikin sendiri juga bisa.
lcd ini hanya menerima data ascii kemudian menampilkannya di lcd. contoh code pake bascom, monggo disesuaikan sendiri:
'--- Multi Wii copter ---
'--- LCD Config ---
'--- Chip ---
$regfile = "m32def.dat"
$crystal = 4000000
$baud = 115200
$hwstack = 32
$swstack = 10
$framesize = 40
'--- lcd ---
Config Lcdpin = Pin , Db4 = Porta.4 , Db5 = Porta.5 , Db6 = Porta.6 , Db7 = Porta.7 , E = Porta.3 , Rs = Porta.2
Config Lcd = 16 * 2
'--- Dims ---
Dim Wii_string As String * 36
Dim Wii_string_pars As String * 36
Dim Wii_name As String * 16
Dim Wii_wert As String * 16
Dim S As String * 1
Dim X As Integer
'--- boot ---
Cls
Cursor Off
Wait 1
Locate 1 , 1
Lcd "MultiWii Conf"
Locate 2 , 1
Lcd "by Afif"
' Wait 2
'Cls
'--- Main ---
Do
Wii_string = ""
Wii_name = ""
Wii_wert = "" ''
Inputbin Wii_string
Cls
X = 0
Do
S = Mid(wii_string , X , 1)
X = X + 1
Loop Until S = "L"
Wii_string_pars = Mid(wii_string , X , 36)
Wii_name = Mid(wii_string_pars , 2 , 16)
Wii_wert = Mid(wii_string_pars , 25 , 5)
Locate 1 , 1
Lcd Wii_name
Locate 2 , 1
Lcd Wii_wert
Loop
End
to be continue.....huahhh capek....






 pak Aan
pak Aan


{kind=link}